Autonomous Spacecraft Decision Making with Reinforcement Learning

As deep space missions continue to grow in complexity, scope, and number, the need for autonomy is paramount. When these satellite are operating millions of miles away from Earth, with minutes of light-time delay, these systems need to react dynamically to their environment while maintaining safety and maximizing science. Reinforcement learning provides a framework for achieving this autonomy. Explicitly, reinforcement learning is a framework by which satellite and spacecraft (agents) are trained to make complex decisions in uncertain environments.
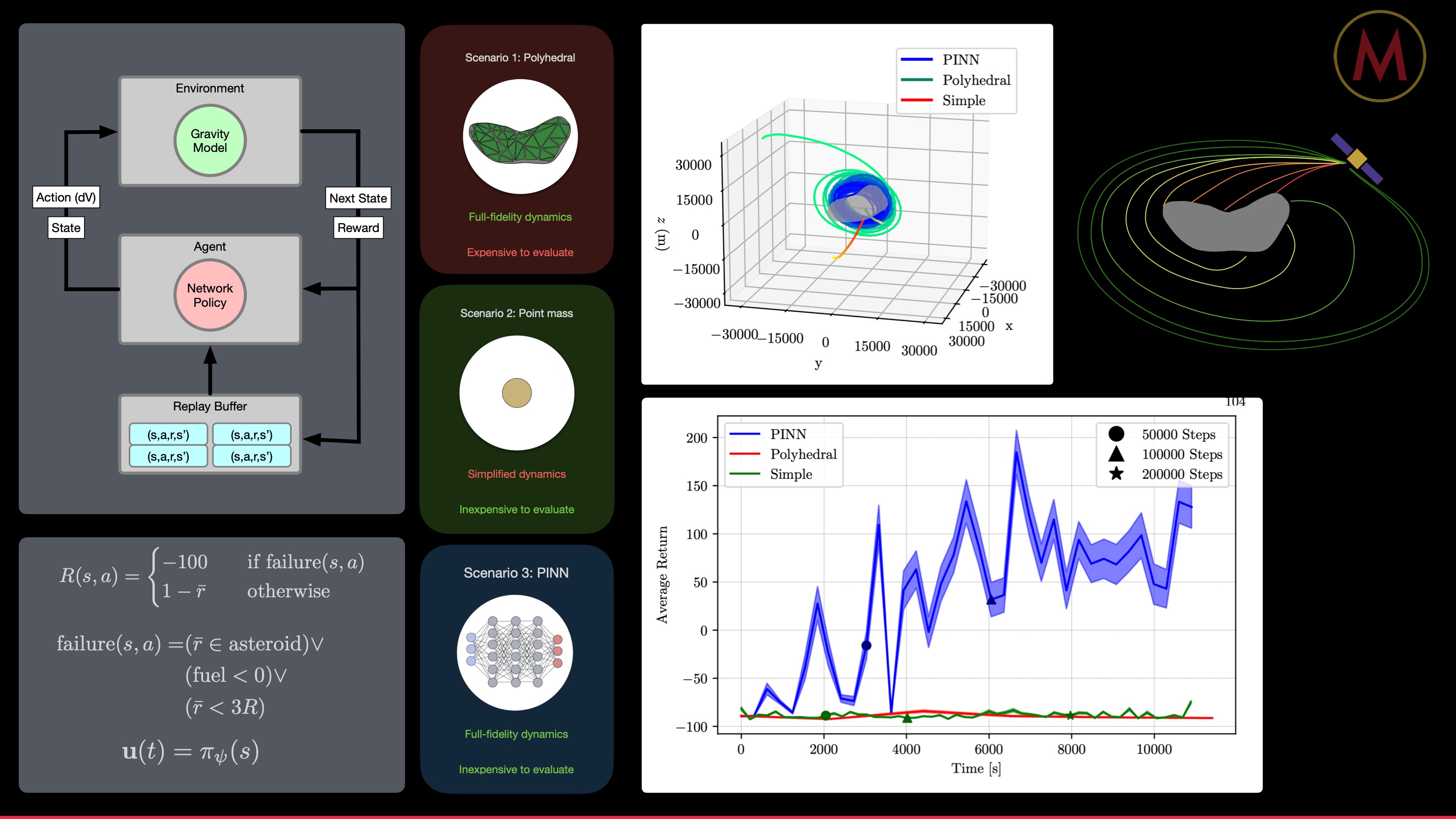
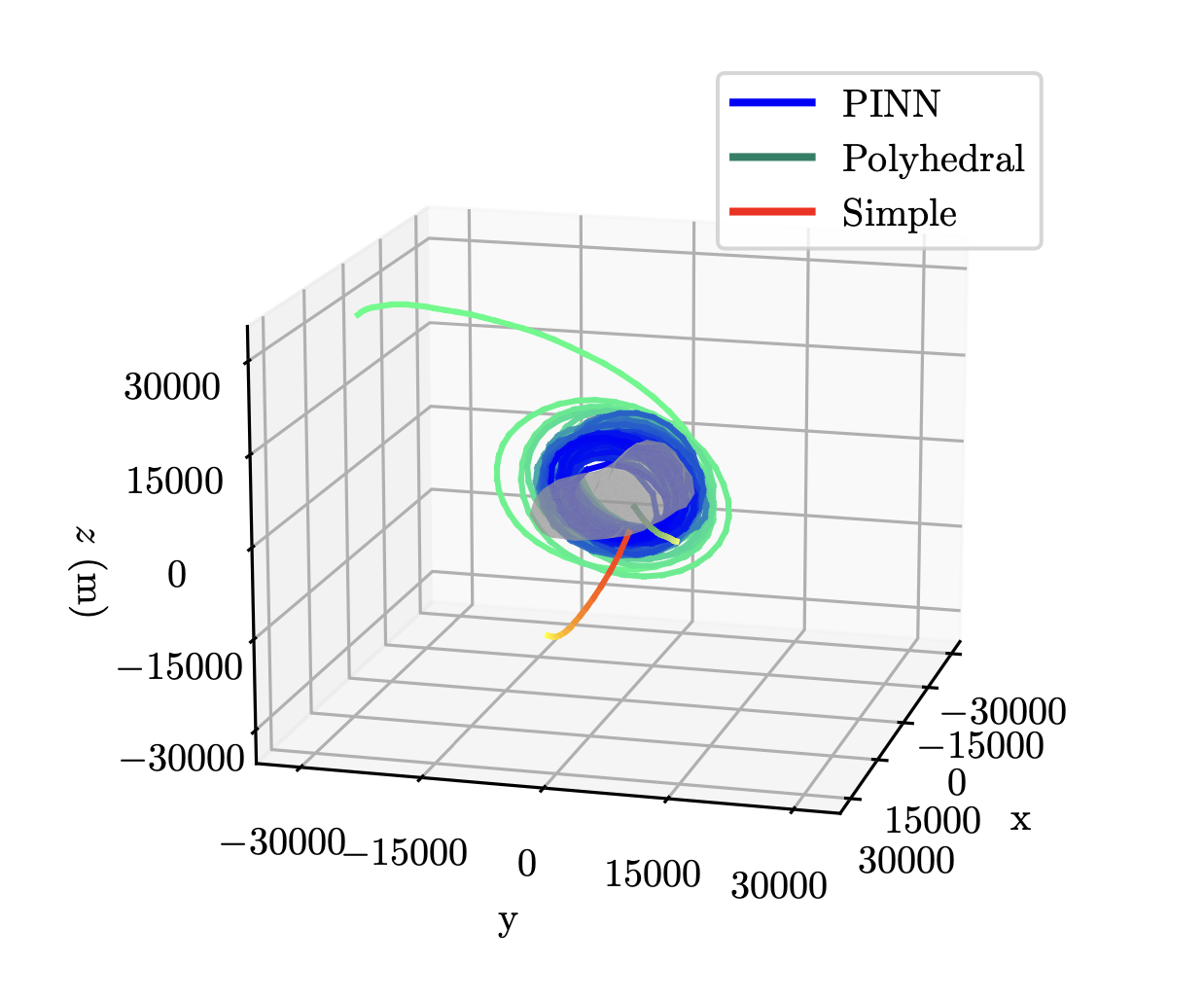
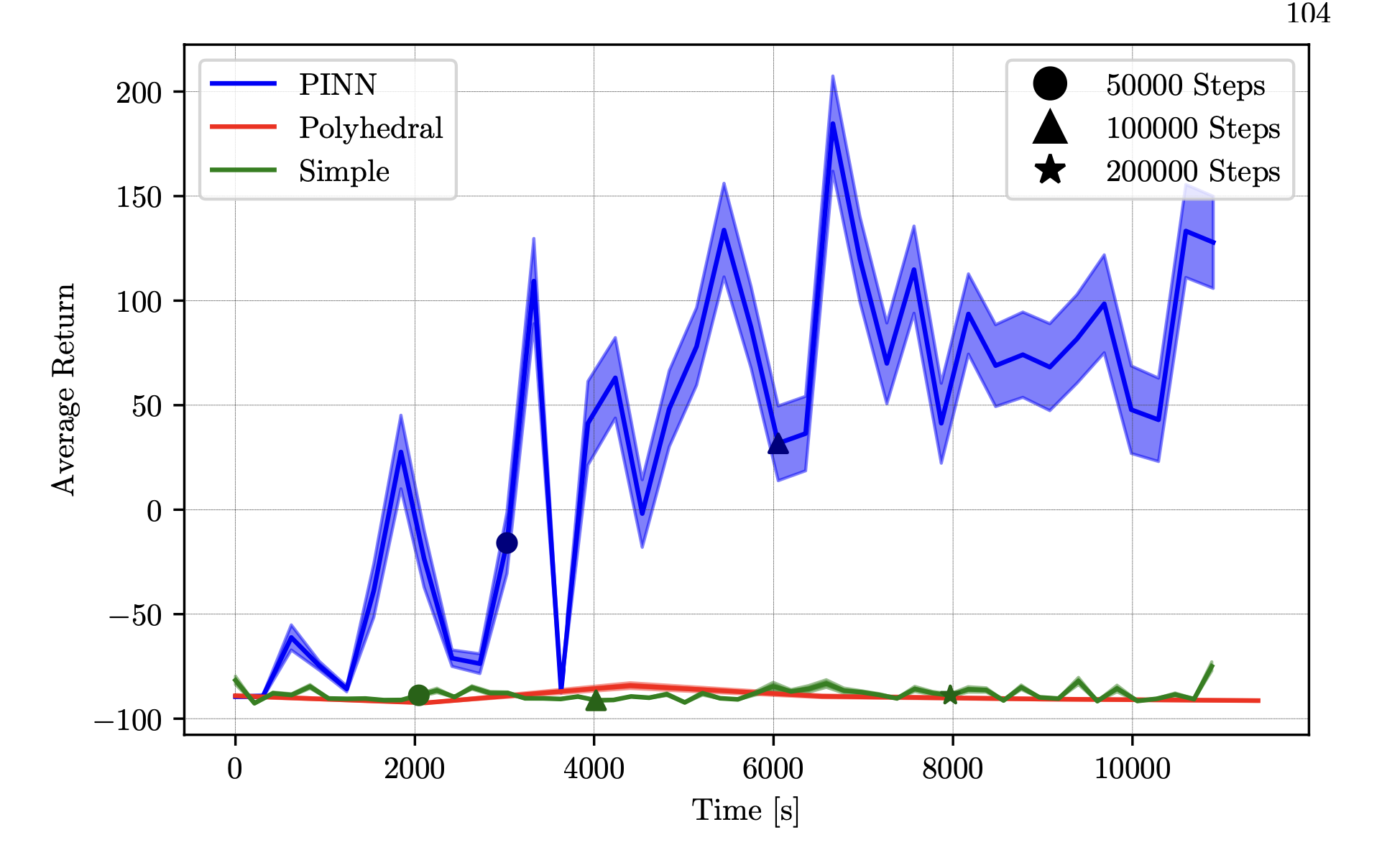
This project specifically focuses on how to train spacecraft to safely and efficiently navigate in small-body environments. Given the increasing focus on exploration of these solar system targets, it is important that spacecraft are able to react dynamically to the chaotic environment of these systems — avoiding collisions and preserving fuel while maximizing science. This project focuses on developing high-fidelity simulations of these environments to develop control and tasking algorithms with deep reinforcement learning. Using these algorithms, our agents are able to dynamically balance spacecraft health, navigation uncertainty, and mission science to construct optimal trajectories and schedules that maximize information about the environment while minimizing risk.